 TCP网络连接以及TIME_WAIT的意义
TCP网络连接以及TIME_WAIT的意义
# 一. 三次握手
# tcp在建立连接时需要三次握手:
1.accept接受过程中等待客户端的连接,当客户端发起连接时,会发起一个syn连接请求, 2.服务端收到该连接请求之后会立即响应一个ack的响应,与此同时还会向客户端发送一个syn连接请求 3.当客户端收到服务端的ack响应请求和syn连接请求之后,再向服务端回应一个ack的响应请求就可以建立tcp连接了
# tcp的四次挥手:
1.再客户端和服务端的代码中都有一个close方法,当有一方主动断开时,也就是执行close方法时,就是一次fin断开请求,在发出断开连接请求之后,如果收到对方的断开确认ack请求之后,就可以结束一段段额断开了,这样就是两次请求; 2.当客户端和服务端双方都执行close方法,就会有两次断开请求和两次断开确认,这样就完成了连接断开,四次挥手;
# 为什么连接是三次,而握手需要四次:
因为在创建连接时,服务端收到客户端的连接请求后,会发送一个ack的响应和一个syn的请求,为了解决资源开销,这两个操作合并在了一起,就是三次握手了,但是在断开tcp连接的时候在一方断开请求的时候另一方可能还有数据正在传输,,为了确保数据传输的完整性,就需要四次挥手.
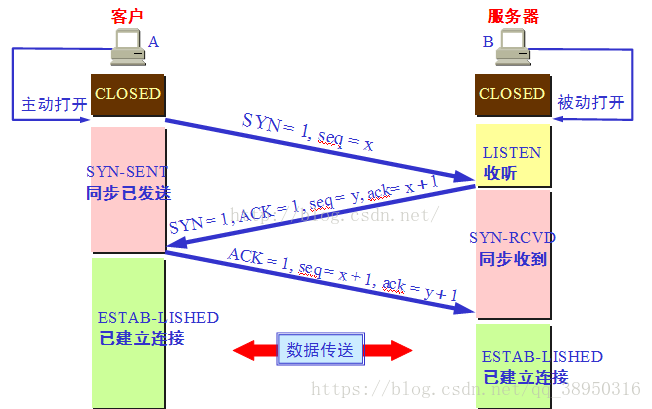
第一次握手:建立连接时,客户端发送syn包(syn=j)到服务器,并进入SYN_SENT状态,等待服务器确认;SYN:同步序列编号(Synchronize Sequence Numbers)。
第二次握手:服务器收到syn包,必须确认客户的SYN(ack=j+1),同时自己也发送一个SYN包(syn=k),即SYN+ACK包,此时服务器进入SYN_RECV状态;
第三次握手:客户端收到服务器的SYN+ACK包,向服务器发送确认包ACK(ack=k+1),此包发送完毕,客户端和服务器进入ESTABLISHED(TCP连接成功)状态,完成三次握手。
# 二. 四次挥手
# tcp在建立连接时需要三次握手:
1.accept接受过程中等待客户端的连接,当客户端发起连接时,会发起一个syn连接请求, 2.服务端收到该连接请求之后会立即响应一个ack的响应,与此同时还会向客户端发送一个syn连接请求 3.当客户端收到服务端的ack响应请求和syn连接请求之后,再向服务端回应一个ack的响应请求就可以建立tcp连接了
# tcp的四次挥手:
1.再客户端和服务端的代码中都有一个close方法,当有一方主动断开时,也就是执行close方法时,就是一次fin断开请求,在发出断开连接请求之后,如果收到对方的断开确认ack请求之后,就可以结束一段段额断开了,这样就是两次请求; 2.当客户端和服务端双方都执行close方法,就会有两次断开请求和两次断开确认,这样就完成了连接断开,四次挥手;
# 为什么连接是三次,而握手需要四次:
因为在创建连接时,服务端收到客户端的连接请求后,会发送一个ack的响应和一个syn的请求,为了解决资源开销,这两个操作合并在了一起,就是三次握手了,但是在断开tcp连接的时候在一方断开请求的时候另一方可能还有数据正在传输,,为了确保数据传输的完整性,就需要四次挥手.
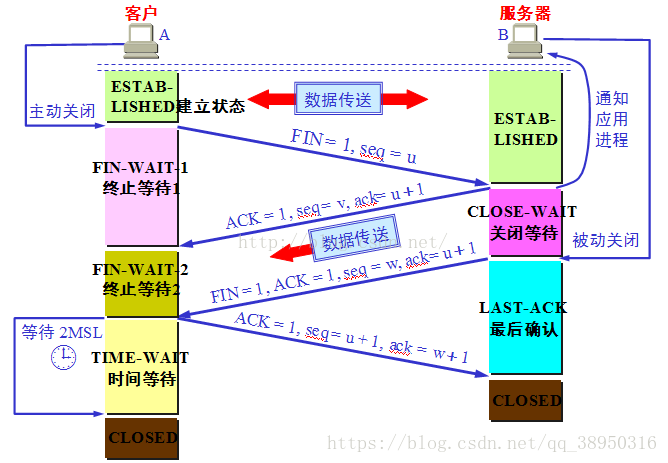
- 1)客户端进程发出连接释放报文,并且停止发送数据。释放数据报文首部,FIN=1,其序列号为seq=u(等于前面已经传送过来的数据的最后一个字节的序号加1),此时,客户端进入FIN-WAIT-1(终止等待1)状态。 TCP规定,FIN报文段即使不携带数据,也要消耗一个序号。
- 2)服务器收到连接释放报文,发出确认报文,ACK=1,ack=u+1,并且带上自己的序列号seq=v,此时,服务端就进入了CLOSE-WAIT(关闭等待)状态。TCP服务器通知高层的应用进程,客户端向服务器的方向就释放了,这时候处于半关闭状态,即客户端已经没有数据要发送了,但是服务器若发送数据,客户端依然要接受。这个状态还要持续一段时间,也就是整个CLOSE-WAIT状态持续的时间。
- 3)客户端收到服务器的确认请求后,此时,客户端就进入FIN-WAIT-2(终止等待2)状态,等待服务器发送连接释放报文(在这之前还需要接受服务器发送的最后的数据)。
- 4)服务器将最后的数据发送完毕后,就向客户端发送连接释放报文,FIN=1,ack=u+1,由于在半关闭状态,服务器很可能又发送了一些数据,假定此时的序列号为seq=w,此时,服务器就进入了LAST-ACK(最后确认)状态,等待客户端的确认。
- 5)客户端收到服务器的连接释放报文后,必须发出确认,ACK=1,ack=w+1,而自己的序列号是seq=u+1,此时,客户端就进入了TIME-WAIT(时间等待)状态。注意此时TCP连接还没有释放,必须经过2∗∗MSL(最长报文段寿命)的时间后,当客户端撤销相应的TCB后,才进入CLOSED状态。
- 6)服务器只要收到了客户端发出的确认,立即进入CLOSED状态。同样,撤销TCB后,就结束了这次的TCP连接。可以看到,服务器结束TCP连接的时间要比客户端早一些。
# 三. 经典问题
【问题1】为什么连接的时候是三次握手,关闭的时候却是四次握手?
因为当Server端收到Client端的SYN连接请求报文后,可以直接发送SYN+ACK报文。其中ACK报文是用来应答的,SYN报文是用来同步的。但是关闭连接时,当Server端收到FIN报文时,很可能并不会立即关闭SOCKET,所以只能先回复一个ACK报文,告诉Client端,"你发的FIN报文我收到了"。只有等到我Server端所有的报文都发送完了,我才能发送FIN报文,因此不能一起发送。故需要四步握手。
【问题2】为什么TIME_WAIT状态需要经过2MSL(最大报文段生存时间)才能返回到CLOSE状态?
虽然按道理,四个报文都发送完毕,我们可以直接进入CLOSE状态了,但是我们必须假象网络是不可靠的,有可以最后一个ACK丢失。所以TIME_WAIT状态就是用来重发可能丢失的ACK报文。在Client发送出最后的ACK回复,但该ACK可能丢失。Server如果没有收到ACK,将不断重复发送FIN片段。所以Client不能立即关闭,它必须确认Server接收到了该ACK。Client会在发送出ACK之后进入到TIME_WAIT状态。Client会设置一个计时器,等待2MSL的时间。如果在该时间内再次收到FIN,那么Client会重发ACK并再次等待2MSL。所谓的2MSL是两倍的MSL(Maximum Segment Lifetime)。MSL指一个片段在网络中最大的存活时间,2MSL就是一个发送和一个回复所需的最大时间。如果直到2MSL,Client都没有再次收到FIN,那么Client推断ACK已经被成功接收,则结束TCP连接。
【问题3】为什么不能用两次握手进行连接?
3次握手完成两个重要的功能,既要双方做好发送数据的准备工作(双方都知道彼此已准备好),也要允许双方就初始序列号进行协商,这个序列号在握手过程中被发送和确认。
现在把三次握手改成仅需要两次握手,死锁是可能发生的。作为例子,考虑计算机S和C之间的通信,假定C给S发送一个连接请求分组,S收到了这个分组,并发 送了确认应答分组。按照两次握手的协定,S认为连接已经成功地建立了,可以开始发送数据分组。可是,C在S的应答分组在传输中被丢失的情况下,将不知道S 是否已准备好,不知道S建立什么样的序列号,C甚至怀疑S是否收到自己的连接请求分组。在这种情况下,C认为连接还未建立成功,将忽略S发来的任何数据分 组,只等待连接确认应答分组。而S在发出的分组超时后,重复发送同样的分组。这样就形成了死锁
2
3
【问题4】如果已经建立了连接,但是客户端突然出现故障了怎么办?
TCP还设有一个保活计时器,显然,客户端如果出现故障,服务器不能一直等下去,白白浪费资源。服务器每收到一次客户端的请求后都会重新复位这个计时器,时间通常是设置为2小时,若两小时还没有收到客户端的任何数据,服务器就会发送一个探测报文段,以后每隔75秒钟发送一次。若一连发送10个探测报文仍然没反应,服务器就认为客户端出了故障,接着就关闭连接。
# 四. 什么是TIME_WAIT
TIME_WAIT是TCP协议中断开连接所经历的一种状态。
- 我们在日常做服务器的研发中、或者面试网络部分知识的时候,会经常问到TIME_WAIT这个词,这个词作为服务端的开发者尤为重要。
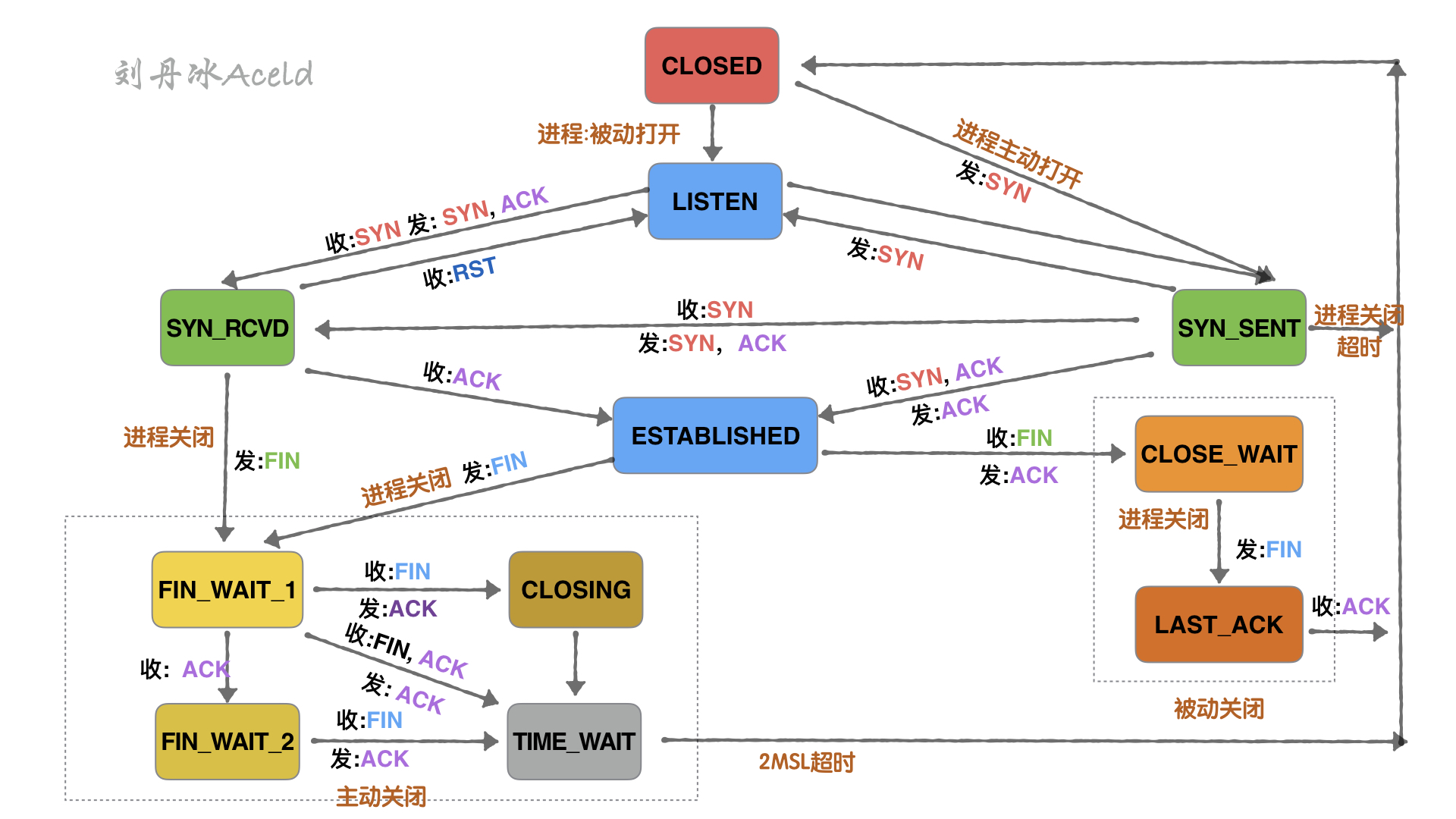
上图是TCP连接的状态转换,包括了一些触发条件,如果不是很直观,可以对比看下面的简图。(三次握手四次挥手)
这里面作为主动关闭的一方(Client)出现了TIME_WAIT状态,目的是告诉Server端,自己没有需要发送的数据,但是它仍然保持了接收对方数据的能力,一个常见的关闭连接过程如下:
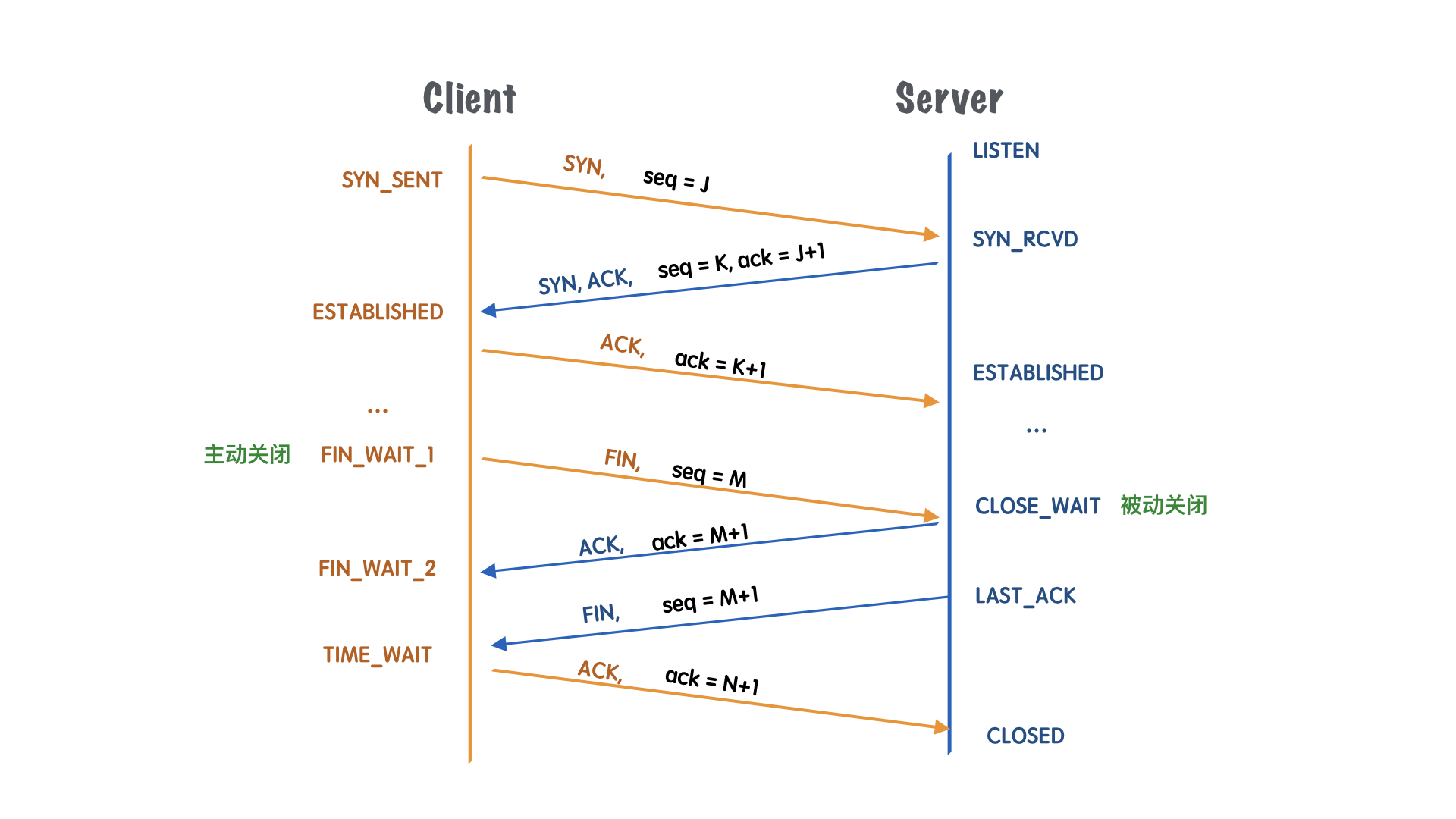
1、当客户端没有待发送的数据时,它会向服务端发送 FIN 消息,发送消息后会进入 FIN_WAIT_1 状态;
2、服务端接收到客户端的 FIN 消息后,会进入 CLOSE_WAIT 状态并向客户端发送 ACK 消息,客户端接收到 ACK 消息时会进入 FIN_WAIT_2 状态;
3、当服务端没有待发送的数据时,服务端会向客户端发送 FIN 消息;
4、客户端接收到 FIN 消息后,会进入 TIME_WAIT 状态并向服务端发送 ACK 消息,服务端收到后会进入 CLOSED 状态;
5、客户端等待两个最大数据段生命周期(Maximum segment lifetime,MSL)的时间后也会进入 CLOSED 状态;
# 五. 为什么需要TIME_WAIT
# TIME_WAIT 一定是发生在主动关闭一方
被动关闭一方,会直接进入
CLOSED状态,而主动关闭一方需要等待2*MSL时间才会最终关闭。原因:
1、防止被动关闭方的延迟数据被人窃取
2、防止被动关闭方没有收到最后的ACK
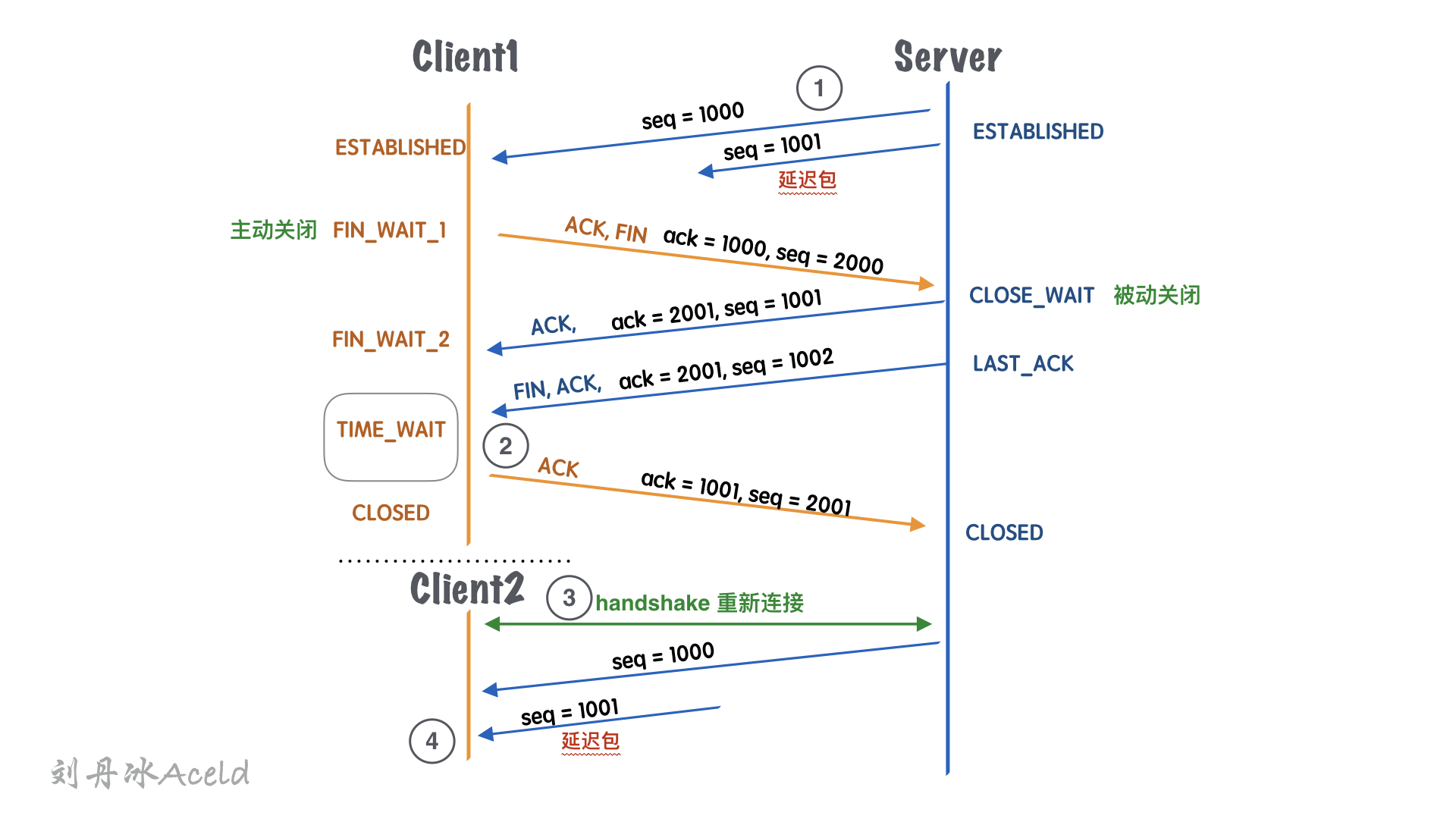
# 原因一:防止被动关闭方的延迟数据被人窃取
如上图所示,
1、在①中,服务端发送seq=1001的消息,由于网络延迟或其他原因,没有及时到达Client1客户端,导致整个包一直存留在网络环境的传输过程中。
2、在②中,Client1收到server的FIN包之后,变成了TIME_WAIT状态,这里假设TIME_WAIT等待的时间很短暂,那么,还没等之前的那个延迟包seq=1001到来,就回复给了Server最后一个ACK包。那么Server就会变成CLOSED状态。
3、在③中,相同的端口号的Client2的TCP链接被重用后
4、在④中,seq=1001的延迟包消息才发送给客户端,而这个延迟的消息却被Client2正常接收,主要就会给Client2带来严重的问题。所以TIME_WAIT不要轻易的调整,或者缩小时间,可能就会出现这种问题。
# 原因二:防止被动关闭方没有收到最后的ACK
该作用就是等待足够长的时间以确定远程的TCP链接收到了其发出的终止链接消息
FIN包的回执消息ACK包。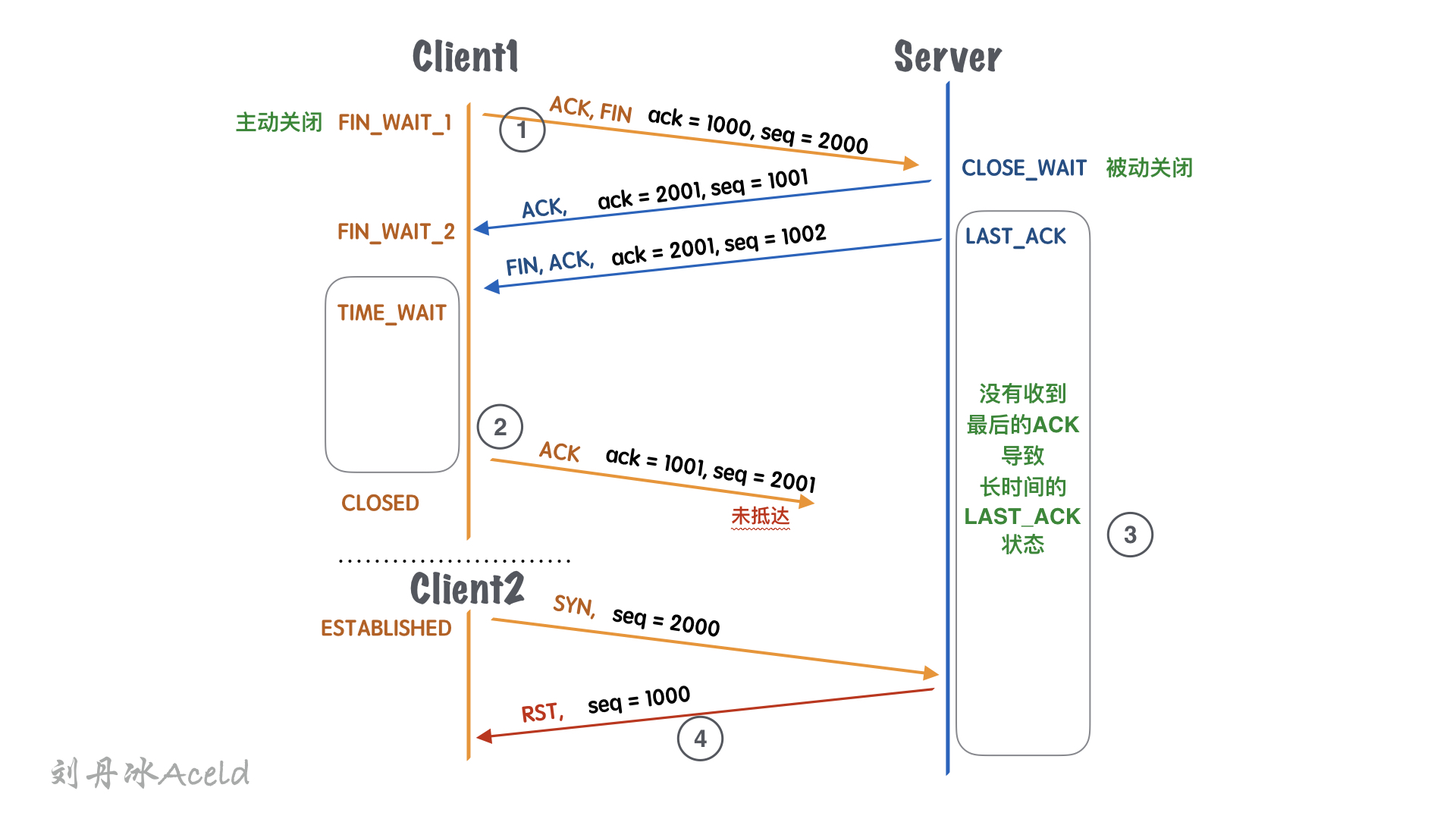
如上图所示:
1、在①中,CLient1端主动发起关闭链接,Server针对Client1的FIN回执了ACK包,然后接着发送了自己的FIN包,等待Client1回执最终的ACK包。
2、在②中,这里假设TIME_WAIT的时间不足够充分,当Server还没有收到 ACK 消息时,Client1就主动变成CLOSED状态。
3、在③中,由于Server一直没有等到自己FIN包的ACK应答包,导致一直处于LAST_ACK状态。
4、在④中,因为 服务端因为没有收到 ACK 消息,当Client2重新与Server建立TCP链接,认为当前连接是合法的,CLient2重新发送 SYN 消息请求握手时会收到Server的 RST 消息,连接建立的过程就会被终止。
所以,我们在默认情况下,如果客户端等待足够长的时间就会遇到以下两种情况:
- 服务端正常收到了
ACK消息并关闭当前 TCP 连接; - 服务端没有收到
ACK消息,重新发送FIN关闭连接并等待新的ACK消息;
只要客户端等待 2 MSL 的时间,客户端和服务端之间的连接就会正常关闭,新创建的 TCP 连接收到影响的概率也微乎其微,保证了数据传输的可靠性。