 Go协程调度原理及GPM模型
Go协程调度原理及GPM模型
# 一. 提高cpu利用率
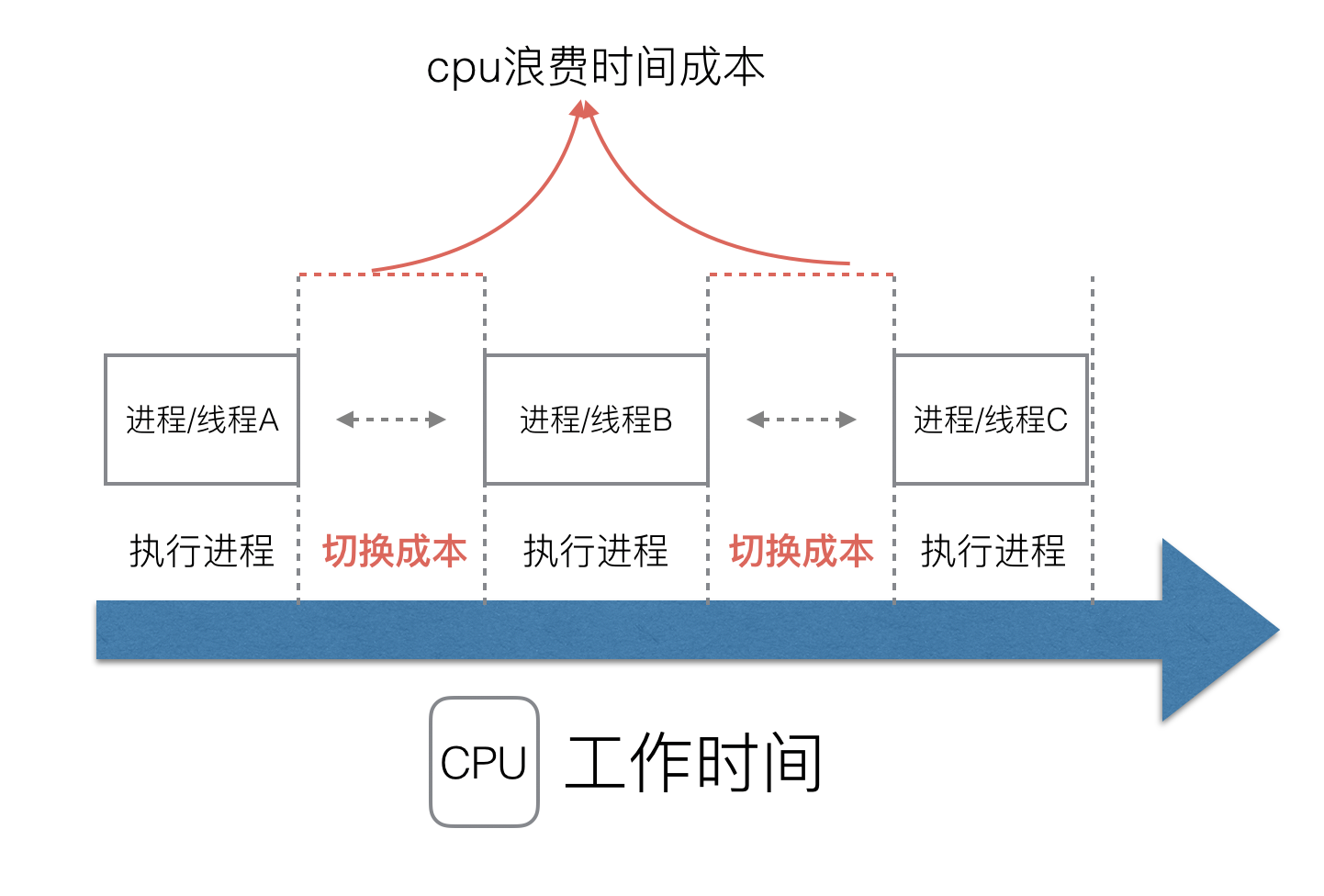
最早的并发能力:多进程并发,当一个进程阻塞的时候,切换到另外等待执行的进程,这样就能尽量把CPU利用起来,CPU就不浪费了。
多进程、多线程已经提高了系统的并发能力,但是在当今互联网高并发场景下,为每个任务都创建一个线程是不现实的,因为会消耗大量的内存(进程虚拟内存会占用4GB[32位操作系统], 而线程也要大约4MB)。
大量的进程/线程出现了新的问题
- 高内存占用
- 调度的高消耗CPU
# 1. 协程 和 m:n模型
大量的进程/线程出现了新的问题
- 高内存占用
- 调度的高消耗CPU
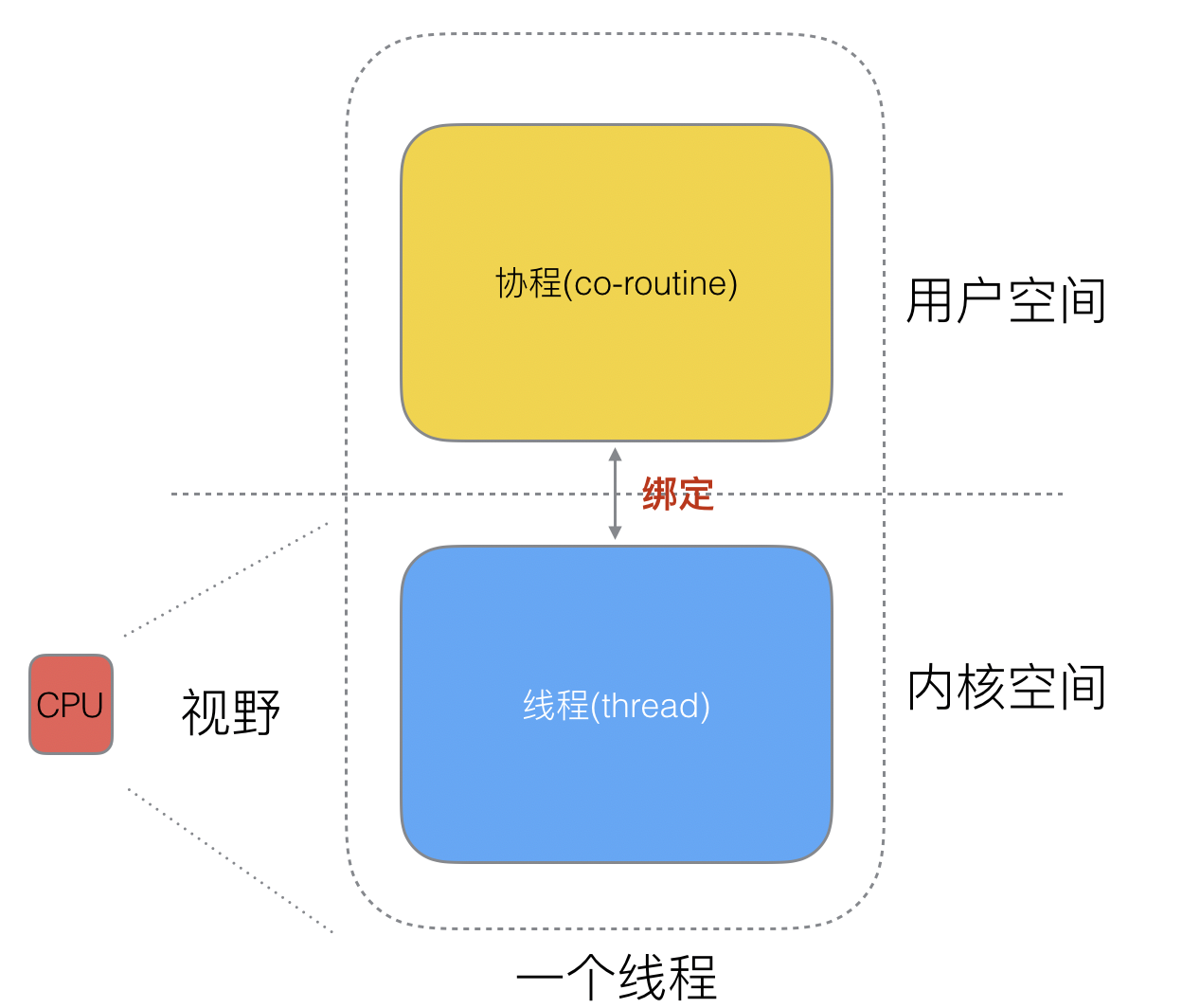
其实一个线程分为“内核态“线程和”用户态“线程。
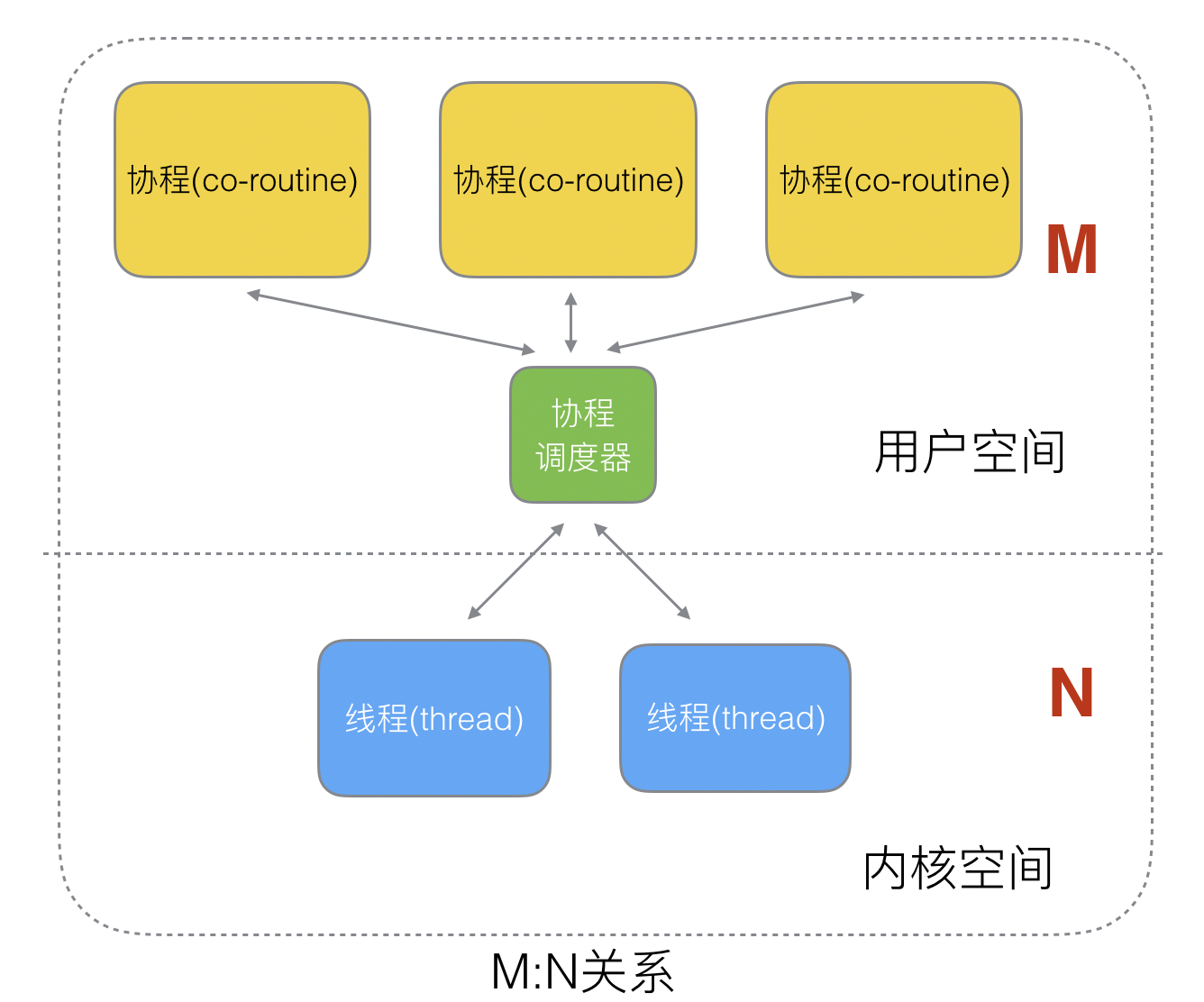
m:n 线程模型
M个用户态线程倚在N个核心线程身上, N个核心线程可能阻塞。每个核心态线程对应一个或多个用户态线程,至少包含一个调度线程。
M,一般只受资源或系统值限制。而对于N,一般受CPU数限制,如果核心线程阻塞
协程跟线程是有区别的,线程由CPU调度是抢占式的,协程由用户态调度是协作式的,一个协程让出CPU后,才执行下一个协程。
# 二. Goroutine调度器的GMP模型
# 1. Goroutine特点
OS线程(操作系统线程)一般都有固定的栈内存(通常为2MB),一个
goroutine的栈在其生命周期开始时只有很小的栈(典型情况下2KB),goroutine的栈不是固定的,他可以按需增大和缩小,goroutine的栈大小限制可以达到1GB,虽然极少会用到这么大。所以在Go语言中一次创建十万左右的goroutine也是可以的。Goroutine特点:
占用内存更小(几kb)
调度更灵活(runtime调度)
Go调度本质是把大量的goroutine分配到少量线程上去执行,并利用多核并行,实现更强大的并发。
# 2. GPM模型
G: goroutine 协程
P: process 处理器
M: 内核线程thread
在Go中,线程是运行goroutine的实体,调度器的功能是把可运行的goroutine分配到工作线程上。
- 全局队列(Global Queue):存放等待运行的G。
- P的本地队列:同全局队列类似,存放的也是等待运行的G,存的数量有限,不超过256个。新建G'时,G'优先加入到P的本地队列,如果队列满了,则会把本地队列中一半的G移动到全局队列。
- P列表:所有的P都在程序启动时创建,并保存在数组中,最多有
GOMAXPROCS(可配置)个。 - M:线程想运行任务就得获取P,从P的本地队列获取G,P队列为空时,M也会尝试从全局队列拿一批G放到P的本地队列,或从其他P的本地队列偷一半放到自己P的本地队列。M运行G,G执行之后,M会从P获取下一个G,不断重复下去。
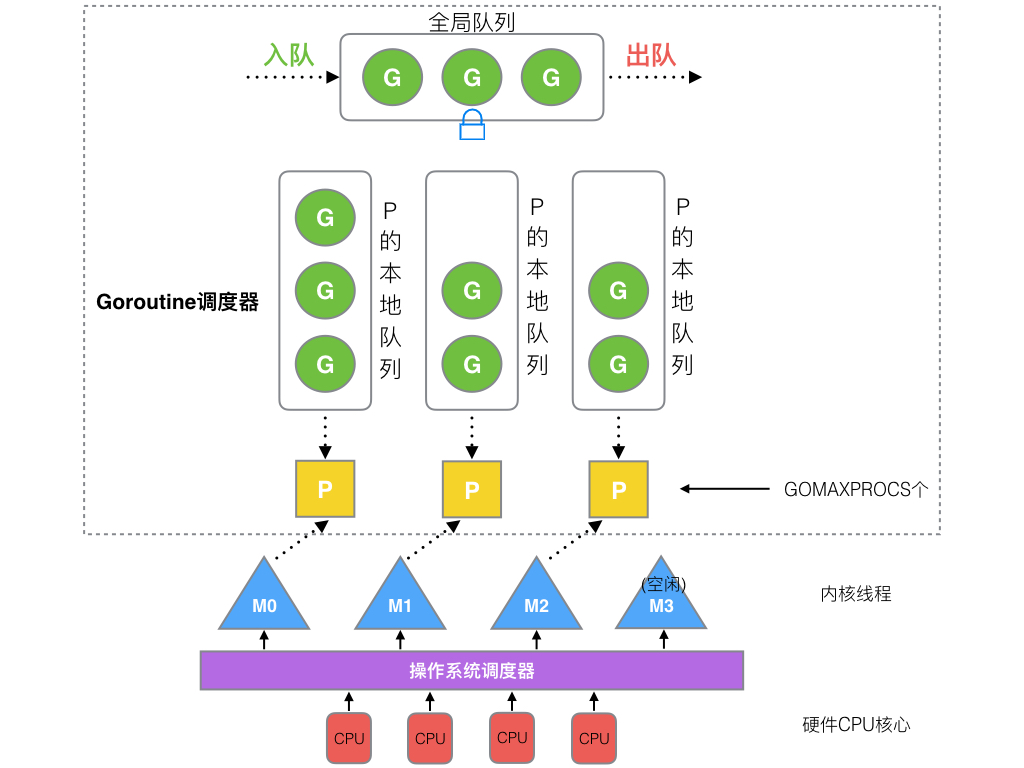
Goroutine调度器和OS调度器是通过M结合起来的,每个M都代表了1个内核线程,OS调度器负责把内核线程分配到CPU的核上执行。
# 2.1 P 和 M 的个数
P的数量
- 由启动时环境变量
$GOMAXPROCS或者是由runtime的方法GOMAXPROCS()决定。这意味着在程序执行的任意时刻都只有$GOMAXPROCS个goroutine在同时运行。
- 由启动时环境变量
M的数量:
- go语言本身的限制:go程序启动时,会设置M的最大数量,默认10000.但是内核很难支持这么多的线程数,所以这个限制可以忽略。
- runtime/debug中的SetMaxThreads函数,设置M的最大数量
- 一个M阻塞了,会创建新的M。
M与P的数量没有绝对关系,一个M阻塞,P就会去创建或者切换另一个M,所以,即使P的默认数量是1,也有可能会创建很多个M出来。
# 2.2 P 和 M 何时会被创建?
P何时创建:在确定了P的最大数量n后,运行时系统会根据这个数量创建n个P。
M何时创建:没有足够的M来关联P并运行其中的可运行的G。比如所有的M此时都阻塞住了,而P中还有很多就绪任务,就会去寻找空闲的M,而没有空闲的,就会去创建新的M。
# 3. Goroutine调度器的设计策略
复用线程:避免频繁的创建、销毁线程,而是对线程的复用.
work stealing 机制: 当本线程无可运行的G时,尝试从其他线程绑定的P偷取G,而不是销毁线程。
hand off 机制: 当本线程因为G进行系统调用阻塞时,线程释放绑定的P,把P转移给其他空闲的线程执行。
利用并行:
GOMAXPROCS设置P的数量,最多有GOMAXPROCS个线程分布在多个CPU上同时运行。GOMAXPROCS也限制了并发的程度,比如GOMAXPROCS = 核数/2,则最多利用了一半的CPU核进行并行。抢占:在coroutine中要等待一个协程主动让出CPU才执行下一个协程,在Go中,一个goroutine最多占用CPU 10ms,防止其他goroutine被饿死,这就是goroutine不同于coroutine的一个地方。
全局G队列:在新的调度器中依然有全局G队列,但功能已经被弱化了,当M执行work stealing从其他P偷不到G时,它可以从全局G队列获取G
# 4. Go func() 调度流程
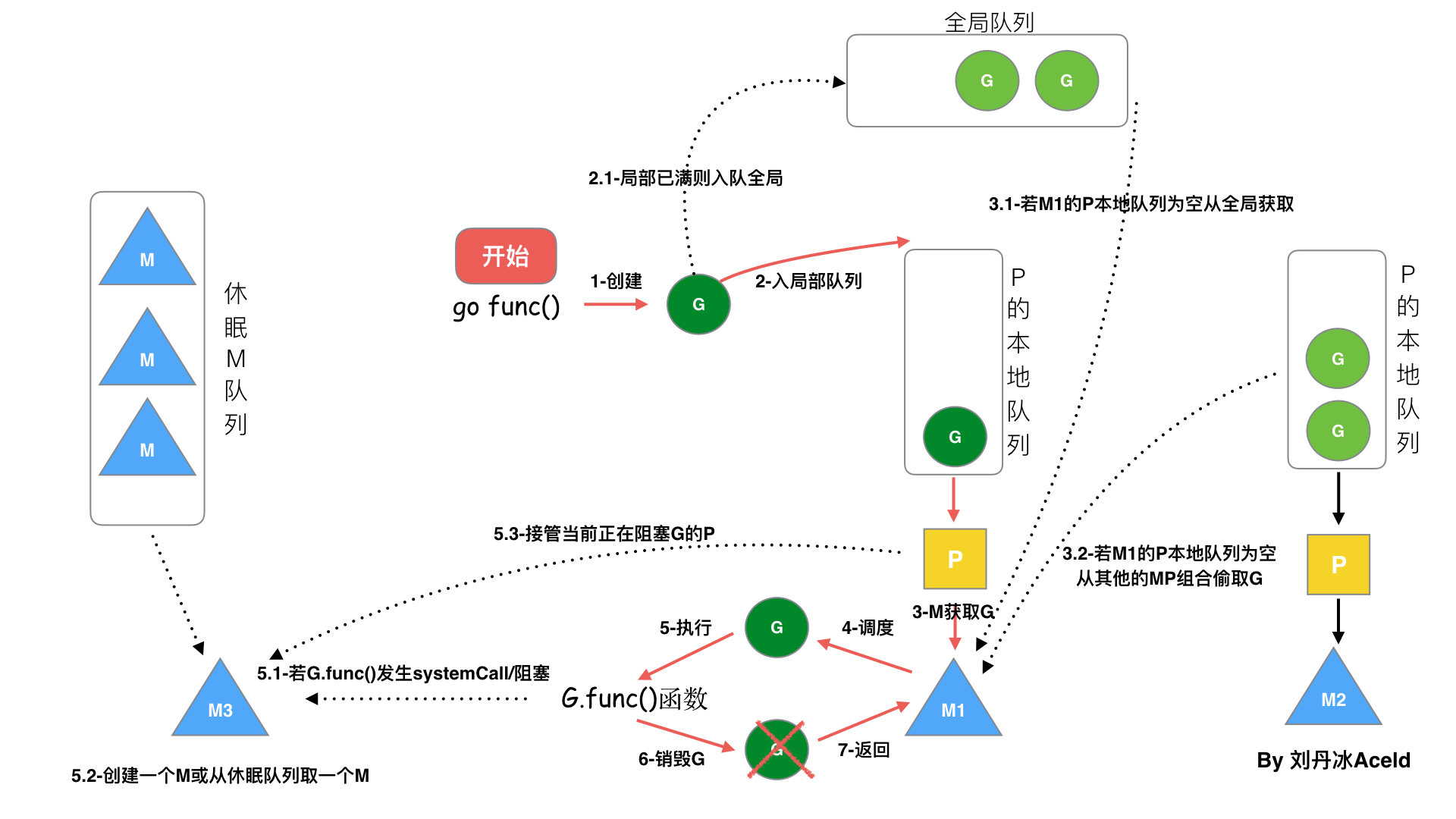
从上图我们可以分析出几个结论:
我们通过 go func()来创建一个goroutine;
有两个存储G的队列,一个是局部调度器P的本地队列、一个是全局G队列。新创建的G会先保存在P的本地队列中,如果P的本地队列已经满了就会保存在全局的队列中;
G只能运行在M中,一个M必须持有一个P,M与P是1:1的关系。M会从P的本地队列弹出一个可执行状态的G来执行,如果P的本地队列为空,就会想其他的MP组合偷取一个可执行的G来执行;
一个M调度G执行的过程是一个循环机制;
当M执行某一个G时候如果发生了syscall或则其余阻塞操作,M会阻塞,如果当前有一些G在执行,runtime会把这个线程M从P中摘除(detach),然后再创建一个新的操作系统的线程(如果有空闲的线程可用就复用空闲线程)来服务于这个P;
当M系统调用结束时候,这个G会尝试获取一个空闲的P执行,并放入到这个P的本地队列。如果获取不到P,那么这个线程M变成休眠状态, 加入到空闲线程中,然后这个G会被放入全局队列中。
# 5. 调度器的生命周期
M0
M0是启动程序后的编号为0的主线程,这个M对应的实例会在全局变量runtime.m0中,不需要在heap上分配,M0负责执行初始化操作和启动第一个G, 在之后M0就和其他的M一样了。G0
G0是每次启动一个M都会第一个创建的gourtine,G0仅用于负责调度的G,G0不指向任何可执行的函数, 每个M都会有一个自己的G0。在调度或系统调用时会使用G0的栈空间, 全局变量的G0是M0的G0。
package main
import "fmt"
func main() {
fmt.Println("Hello world")
}
2
3
4
5
6
7
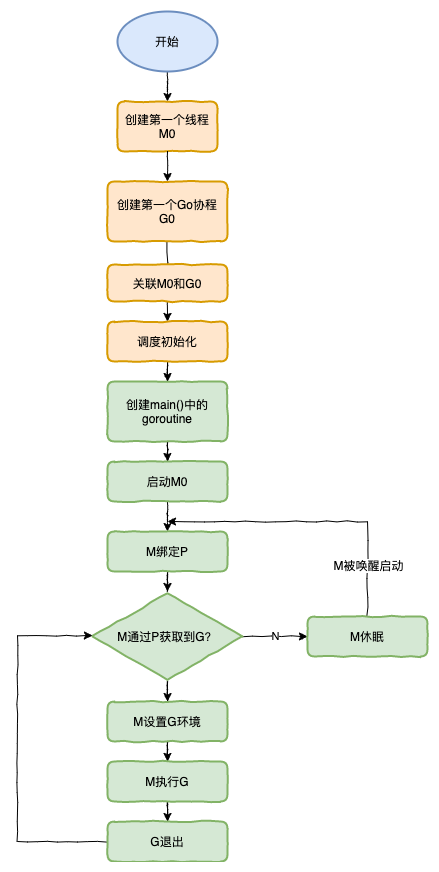
- 针对上面的代码对调度器里面的结构做一个分析。也会经历如上图所示的过程:
- runtime创建最初的线程m0和goroutine g0,并把2者关联。
- 调度器初始化:初始化m0、栈、垃圾回收,以及创建和初始化由GOMAXPROCS个P构成的P列表。
- 示例代码中的main函数是
main.main,runtime中也有1个main函数——runtime.main,代码经过编译后,runtime.main会调用main.main,程序启动时会为runtime.main创建goroutine,称它为main goroutine吧,然后把main goroutine加入到P的本地队列。 - 启动m0,m0已经绑定了P,会从P的本地队列获取G,获取到main goroutine。
- G拥有栈,M根据G中的栈信息和调度信息设置运行环境
- M运行G
- G退出,再次回到M获取可运行的G,这样重复下去,直到
main.main退出,runtime.main执行Defer和Panic处理,或调用runtime.exit退出程序。
- 调度器的生命周期几乎占满了一个Go程序的一生,
runtime.main的goroutine执行之前都是为调度器做准备工作,runtime.main的goroutine运行,才是调度器的真正开始,直到runtime.main结束而结束。
# 6. goroutine 调度切换条件
- runtime.Sched() 主动让出cpu
- channel 读写阻塞
- 遇到互斥锁
- 网络IO
- 阻塞的系统调用
# 7. 抢占式调度器
- 对 Go 语言并发模型的修改提升了调度器的性能,但是 1.1 版本中的调度器仍然不支持抢占式调度,程序只能依靠 Goroutine 主动让出 CPU 资源才能触发调度。Go 语言的调度器在 1.2 版本4中引入基于协作的抢占式调度解决下面的问题5:
- 某些 Goroutine 可以长时间占用线程,造成其它 Goroutine 的饥饿;
- 垃圾回收需要暂停整个程序(Stop-the-world,STW),最长可能需要几分钟的时间6,导致整个程序无法工作;
- 1.2 版本的抢占式调度虽然能够缓解这个问题,但是它实现的抢占式调度是基于协作的,在之后很长的一段时间里 Go 语言的调度器都有一些无法被抢占的边缘情况,例如:for 循环或者垃圾回收长时间占用线程,这些问题中的一部分直到 1.14 才被基于信号的抢占式调度解决。
# 7.1 基于协作的抢占式调度
编译器会在调用函数前插入
runtime.morestack(opens new window);- Go 语言运行时会在垃圾回收暂停程序、系统监控发现 Goroutine 运行超过 10ms 时发出抢占请求
StackPreempt;
- Go 语言运行时会在垃圾回收暂停程序、系统监控发现 Goroutine 运行超过 10ms 时发出抢占请求
当发生函数调用时,可能会执行编译器插入的
runtime.morestack(opens new window),它调用的runtime.newstack(opens new window) 会检查 Goroutine 的stackguard0字段是否为StackPreempt;如果
stackguard0是StackPreempt,就会触发抢占让出当前线程;
因为这里的抢占是通过编译器插入函数实现的,还是需要函数调用作为入口才能触发抢占,所以这是一种协作式的抢占式调度。
# 7.2 基于信号的抢占式调度
- 程序启动时,在
runtime.sighandler中注册_SIGURG信号的处理函数runtime.doSigPreempt; - 此时有一个 M1 通过 signalM 函数向 M2 发送中断信号
_SIGURG; - M2 收到信号,操作系统中断其执行代码,并切换到信号处理函数
runtime.doSigPreempt; - M2 调用
runtime.asyncPreempt修改执行的上下文,重新进入调度循环进而调度其他 G;
